A practical decision framework from the floor at Big Sky Engineering.
“Which one do we really need?” It’s one of the first questions a plant engineer asks when we sit down to scope a new automation cell. SCARA versus 6-axis sounds like a technical question, but the answer is almost always about three things: motion geometry, cycle time, and budget. Get those three right and the robot choice picks itself.
Get them wrong, and you can add six figures to the BOM, weeks to the cycle time, or both. Here’s how we actually make the call, with two examples from cells we’ve delivered recently.
A One-Paragraph Primer
A SCARA (Selective Compliance Articulated Robot Arm) has four axes and operates in a planar workspace with a vertical Z stroke. It’s fast, very repeatable, and inexpensive for its working envelope. A 6-axis articulated robot has, well, six axes, and can reach the same point in space from many different orientations. That orientation freedom is what you pay for. If you don’t need it, you shouldn’t buy it.
The Four Questions We Ask
1. What does the motion actually look like? If the move is “pick from up here, set down over there,” you’re in SCARA territory. If the approach is at a compound angle, or has to clear an obstacle on the way in, you’re probably looking at 6-axis.
2. What cycle time do you have to hit? A SCARA running a known planar pick-and-place will index 40+ cycles per minute without breaking a sweat. A 6-axis doing the same move is slower, sometimes meaningfully, because it carries more linked mass through more joints.
3. Does the end-of-arm tool need to approach at an angle? If yes, SCARA is out. If no, SCARA wins on cost and speed almost every time.
4. What’s the payload-and-reach combination? SCARAs are typically rated to 2 to 20 kg payload and roughly 400 to 1,200 mm reach. Beyond that envelope, or for tall vertical lifts, 6-axis is the only practical option.
Where SCARA Wins (Example: A Recent Robotic Assembly Cell)
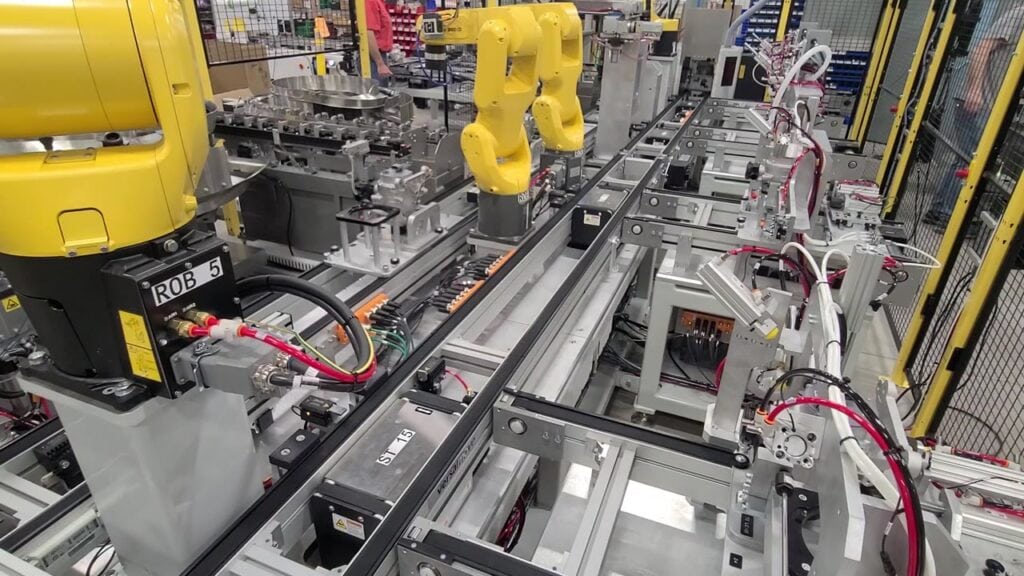
On a fully automated final-assembly cell we delivered last year for a Tier-1 mechanical-assembly customer, we specified three FANUC SCARAs across three different stations. None of them were “obvious” SCARA jobs at first glance, but every one of them was a planar pick-and-place at heart:
- Wave-washer insertion: pick a washer from an escapement, place it into the housing, vision-verify the seat.
- Motor placement and lubrication: pick the motor from a vibratory feed, rotate through a lube spray, place precisely into the housing.
- Post-vision component placement: grab parts that were already oriented at the feeder.
Every move ended with the EOAT pointed straight down. There was no part of the work that needed orientation freedom mid-flight. Putting 6-axis robots at those stations would have made the cell more expensive, slower, and harder to maintain, with no measurable upside.
A second recent example: a continuous-feed box-cutter we quoted for a packaging customer. The optional cut-lid removal called for a robot that could pull a cut lid off a case moving past at 20 cases per minute, then drop it to the side. Vertical pick, planar travel, place. Spec’d a FANUC SCARA for the same reason. Nothing in the motion benefits from articulation.
Where 6-Axis Earns Its Keep (Same Cell, Different Stations)
That same assembly cell also used two FANUC 6-axis robots. They handled two stations the SCARAs couldn’t:
- Orientation-critical component placement. Two parts (an elbow and a connector body) came out of vibratory bowls in one orientation and had to land in the assembly in a different orientation. A SCARA would have needed a re-orient fixture and a second pick. The 6-axis wrists do the rotation as part of the move, in one motion.
- Multi-axis torque-monitored screw driving. Four fasteners had to be inserted at different approach angles, with closed-loop torque monitoring. A 6-axis driver hits each angle directly. A SCARA would have needed a tilt fixture and at least two cycles per station.
The rule we follow: if the EOAT has to do work the robot’s wrists can do for free, use 6-axis. If it doesn’t, use SCARA.
The Cost Reality
In the same payload class, a 6-axis robot typically runs 1.5x to 2x the cost of a SCARA before you account for the larger controller, the more involved safety-rated stop logic, and (often) a heavier base. On a multi-robot cell, the wrong call adds five figures to the BOM and weeks to mechanical design.
But the inverse is worse. Forcing a SCARA onto a job that really wants a 6-axis is how you end up paying for it in custom tilt fixtures, slower cycle times, and a reject rate that should never have existed. That’s false economy.
Quick Reference
| Question | SCARA wins when… | 6-Axis wins when… |
|---|---|---|
| Motion geometry | Vertical pick, planar place | Compound or non-vertical approach angles |
| Cycle time | Fastest option for planar moves | Acceptable trade for orientation work |
| Orientation requirements | Part is already oriented or can be fixtured | Wrist axes do orientation as part of the move |
| Payload + reach | Up to ~20 kg within ~1,200 mm | Heavier loads or larger working envelope |
| Cost / BOM impact | Lower robot and controller cost | Worth the premium when geometry demands it |
If You’re Scoping a Cell
The single best thing you can do early is map the motion before you spec the robot. Sketch the approach. Walk the cycle. Ask whether anything has to happen at an angle, and whether anything has to happen faster than 30 cycles per minute. The answers usually point straight at one robot or the other.
And if you’d like a second set of eyes on a cell concept, we’re happy to walk through it with you. Most early conversations save more in cycle time and BOM than a full engineering review would have cost, and we’d rather get the geometry right at the whiteboard than fix it on the floor.
Big Sky Engineering builds turnkey automation out of Verona, Wisconsin. Robotics, machine vision, PLC controls, leak and function test, and end-of-line marking, all under one roof. Visit us at www.bigskyeng.com.